0501动态规划基础
05.01 动态规划基础
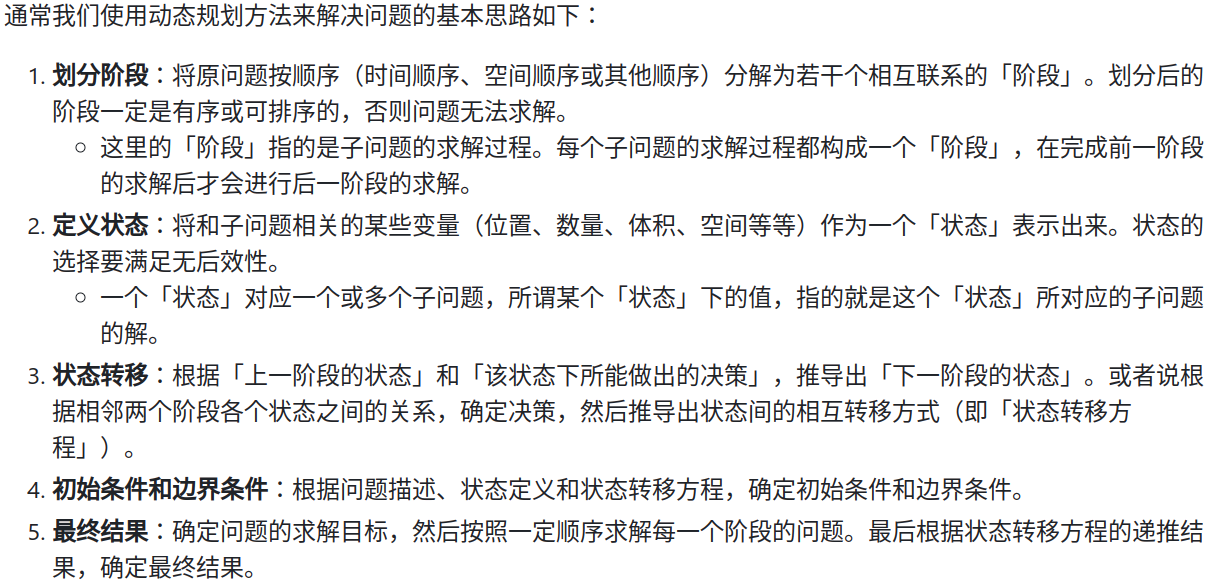
- 把「原问题」分解为「若干个重叠的子问题」,每个子问题的求解过程都构成一个 「阶段」。在完成一个阶段的计算之后,动态规划方法才会执行下一个阶段的计算。
- 在求解子问题的过程中,按照「自顶向下的记忆化搜索方法」或者「自底向上的递推方法」求解出「子问题的解」,把结果存储在表格中,当需要再次求解此子问题时,直接从表格中查询该子问题的解,从而避免了大量的重复计算。
动态规划与分治算法的不同点在于:
- 适用于动态规划求解的问题,在分解之后得到的子问题往往是相互联系的,会出现若干个重叠子问题。
- 使用动态规划方法会将这些重叠子问题的解保存到表格里,供随后的计算查询使用,从而避免大量的重复计算。
不同路径
分析
- 划分阶段:按照路径的结尾位置(行位置、列位置组成的二维坐标)进行阶段划分。
- 定义状态:dp[i][j]表示到达坐标(i,j)位置有多少条不同的路径。
- 状态转移:dp[i][j] = dp[i-1][j] + dp[i][j-1]
- 初始条件和边界条件:初始dp[0][0] = 1;边界条件,当i = 0时,dp[0][j] = 1,即只能由向右走得到;当j = 0时,dp[i][0] = 1,即只能由向下走得到。
- 最终结果:返回dp[m-1][n-1]。
1 | |
- 时间复杂度:$O(n^2)$
- 空间复杂度:O(1)
记忆化搜索是动态规划的一种实现方式。在记忆化搜索中,当算法需要计算某个子问题的结果时,它首先检查是否已经计算过该问题。如果已经计算过,则直接返回已经存储的结果;否则,计算该问题,并将结果存储下来以备将来使用。
- 记忆化搜索:「自顶向下」的解决问题,采用自然的递归方式编写过程,在过程中会保存每个子问题的解(通常保存在一个数组或哈希表中)来避免重复计算。
优点:代码清晰易懂,可以有效的处理一些复杂的状态转移方程。有些状态转移方程是非常复杂的,使用记忆化搜索可以将复杂的状态转移方程拆分成多个子问题,通过递归调用来解决。
缺点:可能会因为递归深度过大而导致栈溢出问题。
- 递推:「自底向上」的解决问题,采用循环的方式编写过程,在过程中通过保存每个子问题的解(通常保存在一个数组或哈希表中)来避免重复计算。
优点:避免了深度过大问题,不存在栈溢出问题。计算顺序比较明确,易于实现。
缺点:无法处理一些复杂的状态转移方程。有些状态转移方程非常复杂,如果使用递推方法来计算,就会导致代码实现变得非常困难。
适合使用「记忆化搜索」的场景:
问题的状态转移方程比较复杂,递推关系不是很明确。
问题适合转换为递归形式,并且递归深度不会太深
适合使用「递推」的场景:
问题的状态转移方程比较简单,递归关系比较明确。
问题不太适合转换为递归形式,或者递归深度过大容易导致栈溢出。
- 写出问题的动态规划「状态」和「状态转移方程」。
- 定义一个缓存(数组或哈希表),用于保存子问题的解。
- 定义一个递归函数,用于解决问题。在递归函数中,首先检查缓存中是否已经存在需要计算的结果,如果存在则直接返回结果,否则进行计算,并将结果存储到缓存中,再返回结果。
- 在主函数中,调用递归函数并返回结果。
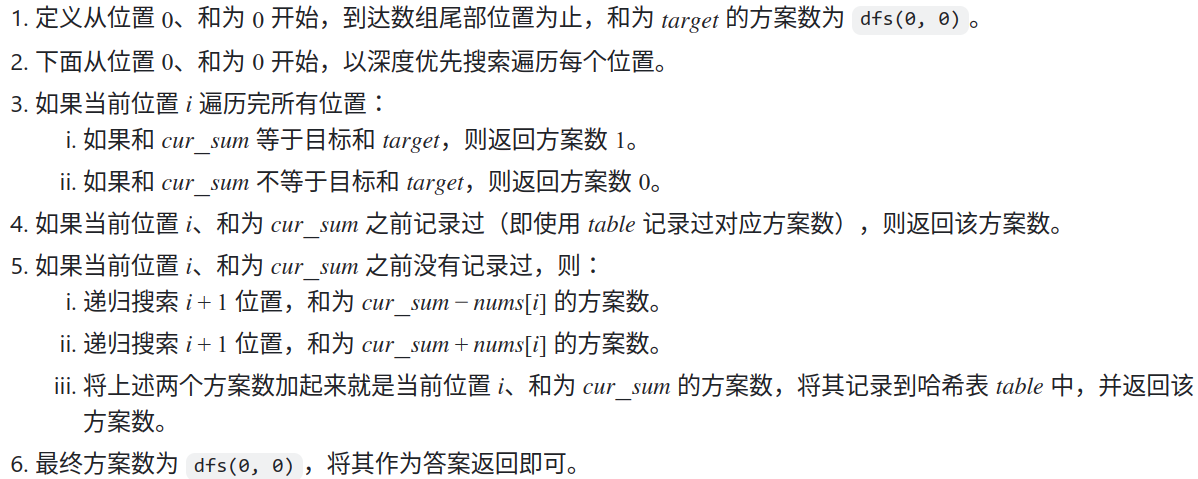
目标和
分析
1 | |
- 时间复杂度:$O(2^n)$
- 空间复杂度:$O(n)$。递归调用的栈空间深度不超过n。
猜数字大小II
分析
通过二分查找方法,能够找到猜中的最小次数,但这个猜中的最小次数所对应的支付金额,并不是最小现金数。
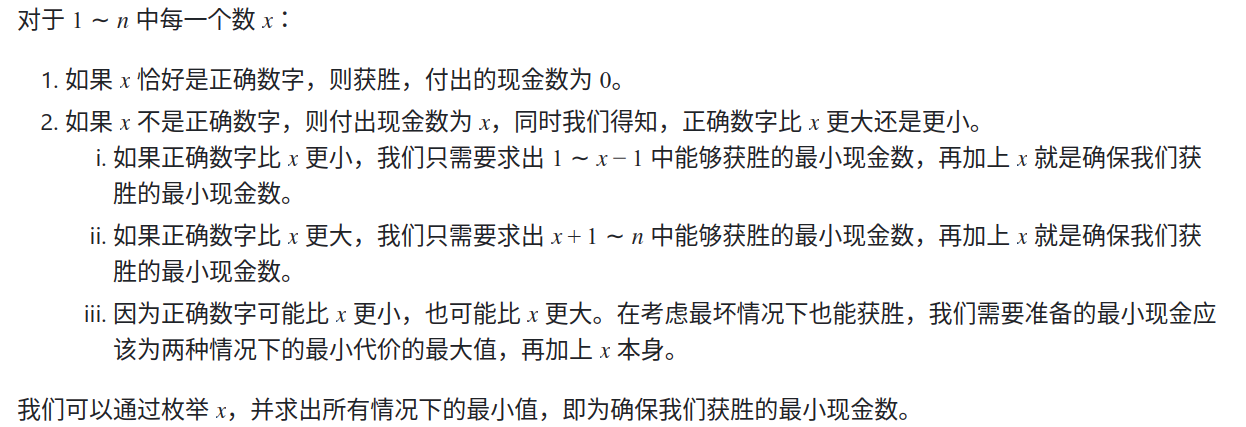
$f(1)(n) = min_{x = 1}^{x = n} \lbrace max \lbrace f(1)(x - 1), f(x + 1)(n) \rbrace + x \rbrace$
1 | |
- 时间复杂度:$O(n^3)$
- 空间复杂度:$O(n^2)$
0501动态规划基础
http://example.com/2024/09/22/posts/0501动态规划基础/